(Nanowerk Information) For many years, researchers have sought to emulate the collective habits of pure methods like colleges of fish or flocks of birds utilizing artificial microscale robots. Such robotic collectives might allow a wide range of purposes, from focused drug supply to environmental remediation. Nonetheless, realizing strong 3D movement of those artificial swarms with out dispersion has confirmed an everlasting problem.
Reporting their findings in Science Advances (“Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater”), researchers from the Chinese language College of Hong Kong and the Max Planck Institute for Clever Methods have developed a bimodal actuation technique that mixes magnetic and optical fields to realize managed 3D locomotion of colloidal robotic collectives.
Because the authors clarify, most present colloidal microrobots depend on bodily boundaries to maneuver round. For instance, colloidal particles activated by ultrasound waves use the partitions of their container to “stroll” alongside surfaces. This sturdy dependence limits maneuverability, because the microbots can not detach from substrates or overcome limitations bigger than their very own dimension. Some 3D management has been demonstrated with magnetically-driven helical microswimmers, however these methods wrestle to keep up cohesion throughout 3D movement.
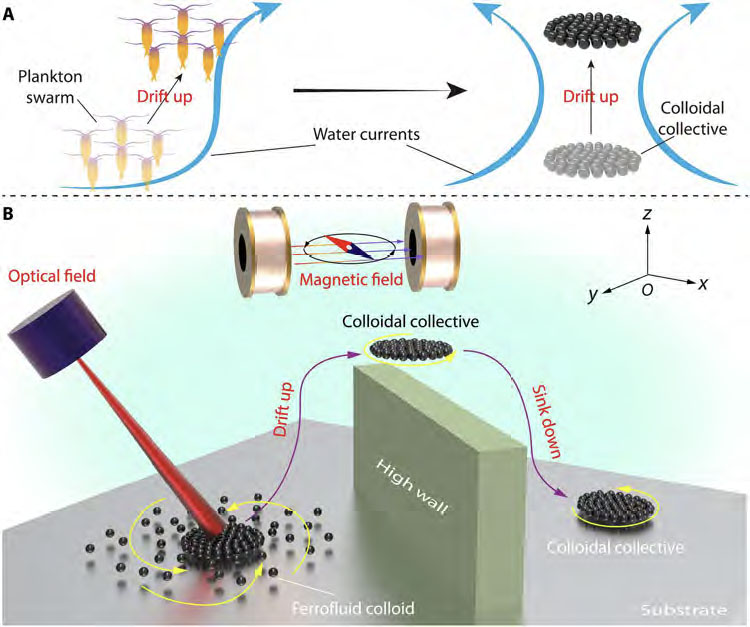
The important thing innovation right here is taking inspiration from nature – particularly, the migration mechanism of plankton. Plankton traverse lengthy distances by drifting with currents and tides, moderately than actively swimming in opposition to them. Adapting this precept to artificial microbot collectives required addressing three most important challenges: stopping dispersion of the swarm throughout drifting, reaching underwater 3D locomotion in opposition to gravity, and enabling easy transitions throughout the air-water interface.
To satisfy these objectives, the researchers pioneered a bimodal actuation strategy utilizing each magnetic and optical fields. The magnetic area serves to set off self-assembly of the colloidal particles into steady collectives, counteracting dispersion. Constructing on earlier methods, tailor-made rotating magnetic fields create magnetic interactions between the microscale particles, inflicting them to spontaneously kind bigger assemblies. The optical area then induces directional drifting of those collectives by way of convection currents.
Particularly, near-infrared gentle absorbed by the particles creates native warmth gradients, which in flip drive fluid flows that carry the collective alongside. Fastidiously controlling the place the sunshine shines on the cluster controls the course of induced currents, enabling exact steering.
This mix of modalities allowed the primary realization of colloidal collectives able to easy 3D locomotion underwater and on the air-water interface. The researchers demonstrated managed vertical ascent, hovering, and horizontal drifting of the collectives completely indifferent from any boundaries. Fluid currents induced by the optically-stimulated thermal gradients present adequate power to beat gravitational settling.
Notably, the swarm stays cohesive as a single steady entity all through this drifting movement. Additional experiments confirmed that flip-over maneuvers and posture changes of the collectives could be executed mid-ascent or descent by adjusting the magnetic area orientation.
Along with capabilities underwater, the proposed colloidal microswarms can transition between liquid and air environments. After utilizing optical stimulation to hold a collective to the water’s floor, rising the sunshine depth produces sturdy sufficient currents to breach the water-air barrier. As soon as above the interface, the swarm is stably suspended by floor pressure. The angle of collectives on the air-water interface can then be managed with the magnetic area to create directional movement alongside the floor or re-submerge into the liquid at will.
This adaptive locomotion might allow microrobot collectives to traverse difficult terrains impassable to different microscopic motile methods. As demonstrations, the authors confirmed their drifting colloidal swarms crossing tall limitations, climbing menisci, and passing by way of slim gaps – maneuvers tough or inconceivable for surface-walking colloidal robots. The twin magnetic and optical response of the methods additionally facilitates selective management of a number of collectives concurrently.
Whereas promising, real-world purposes would require extending this proof-of-concept work. For instance, implementing untethered energy provides and onboard sensors for suggestions management would assist deployment in distant environments. Utilizing biocompatible supplies might additionally allow future in vivo medical use. Nonetheless, the examine represents a considerable advance towards strong, maneuverable microrobotic collectives. The proposed bioinspired actuation technique and 3D capabilities might inform future cell micro-systems throughout domains like supplies science, environmental remediation, and micromedicine.