
[ad_1]
By Andre He, Vivek Myers
A longstanding purpose of the sphere of robotic studying has been to create generalist brokers that may carry out duties for people. Pure language has the potential to be an easy-to-use interface for people to specify arbitrary duties, however it’s troublesome to coach robots to comply with language directions. Approaches like language-conditioned behavioral cloning (LCBC) practice insurance policies to straight imitate skilled actions conditioned on language, however require people to annotate all coaching trajectories and generalize poorly throughout scenes and behaviors. In the meantime, latest goal-conditioned approaches carry out significantly better at normal manipulation duties, however don’t allow straightforward process specification for human operators. How can we reconcile the benefit of specifying duties by LCBC-like approaches with the efficiency enhancements of goal-conditioned studying?
Conceptually, an instruction-following robotic requires two capabilities. It must floor the language instruction within the bodily atmosphere, after which have the ability to perform a sequence of actions to finish the meant process. These capabilities don’t must be discovered end-to-end from human-annotated trajectories alone, however can as a substitute be discovered individually from the suitable knowledge sources. Imaginative and prescient-language knowledge from non-robot sources can assist study language grounding with generalization to various directions and visible scenes. In the meantime, unlabeled robotic trajectories can be utilized to coach a robotic to achieve particular purpose states, even when they aren’t related to language directions.
Conditioning on visible objectives (i.e. purpose photos) supplies complementary advantages for coverage studying. As a type of process specification, objectives are fascinating for scaling as a result of they are often freely generated hindsight relabeling (any state reached alongside a trajectory is usually a purpose). This permits insurance policies to be skilled through goal-conditioned behavioral cloning (GCBC) on giant quantities of unannotated and unstructured trajectory knowledge, together with knowledge collected autonomously by the robotic itself. Objectives are additionally simpler to floor since, as photos, they are often straight in contrast pixel-by-pixel with different states.
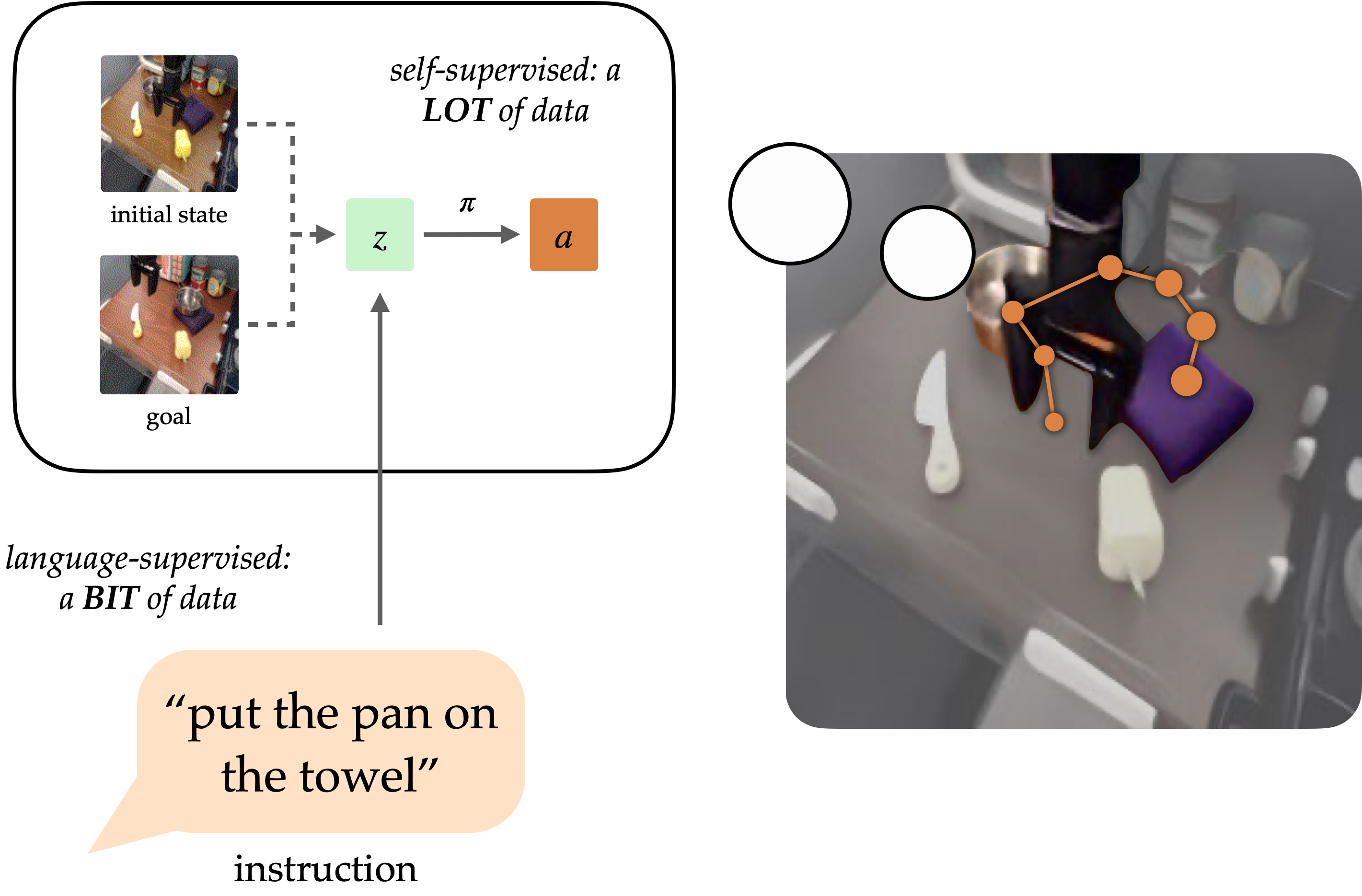
Nevertheless, objectives are much less intuitive for human customers than pure language. Generally, it’s simpler for a person to explain the duty they need carried out than it’s to supply a purpose picture, which might probably require performing the duty in any case to generate the picture. By exposing a language interface for goal-conditioned insurance policies, we are able to mix the strengths of each goal- and language- process specification to allow generalist robots that may be simply commanded. Our technique, mentioned beneath, exposes such an interface to generalize to various directions and scenes utilizing vision-language knowledge, and enhance its bodily expertise by digesting giant unstructured robotic datasets.
Aim representations for instruction following
The GRIF mannequin consists of a language encoder, a purpose encoder, and a coverage community. The encoders respectively map language directions and purpose photos right into a shared process illustration house, which situations the coverage community when predicting actions. The mannequin can successfully be conditioned on both language directions or purpose photos to foretell actions, however we’re primarily utilizing goal-conditioned coaching as a method to enhance the language-conditioned use case.
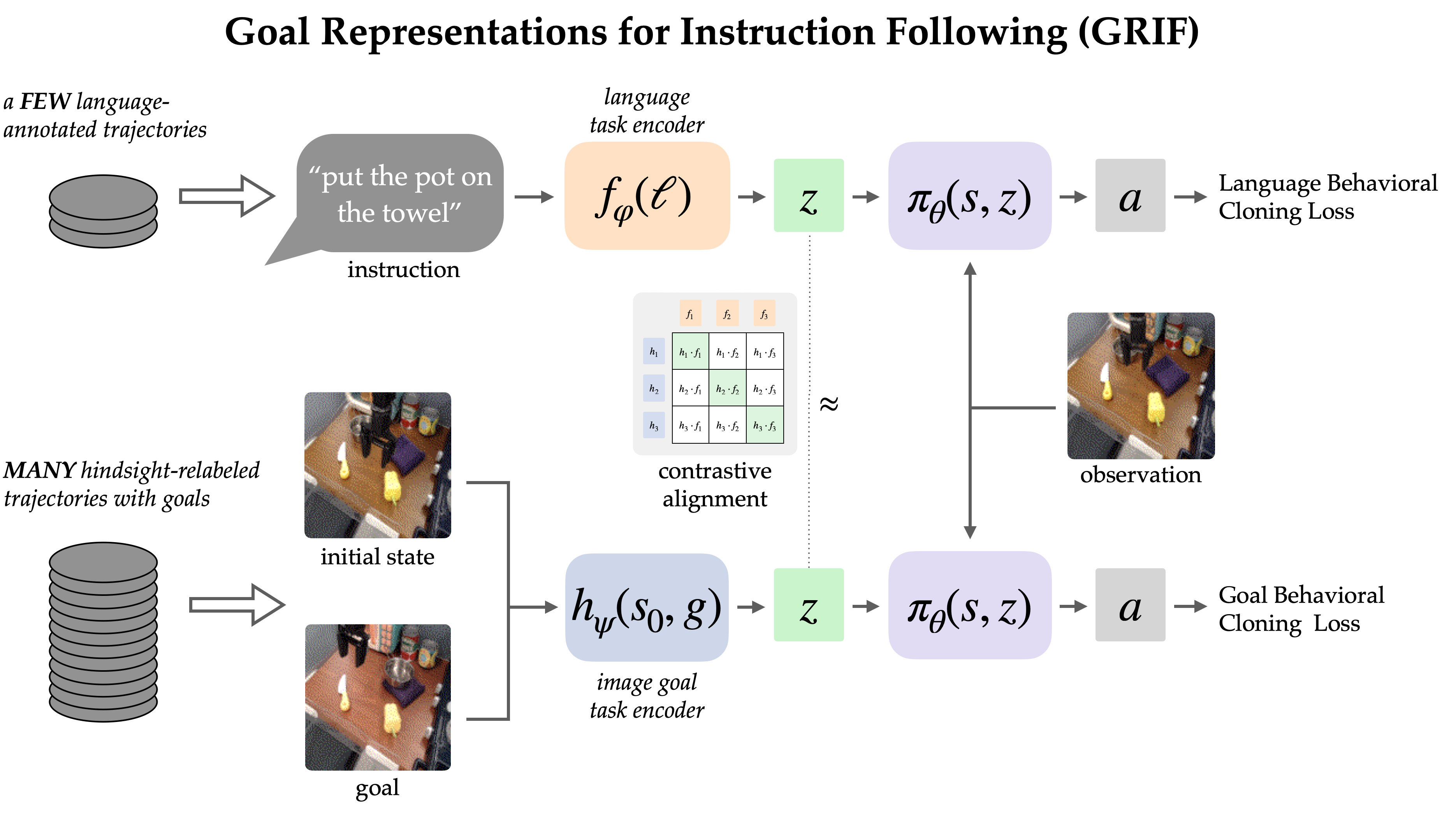
Our strategy, Aim Representations for Instruction Following (GRIF), collectively trains a language- and a goal- conditioned coverage with aligned process representations. Our key perception is that these representations, aligned throughout language and purpose modalities, allow us to successfully mix the advantages of goal-conditioned studying with a language-conditioned coverage. The discovered insurance policies are then in a position to generalize throughout language and scenes after coaching on largely unlabeled demonstration knowledge.
We skilled GRIF on a model of the Bridge-v2 dataset containing 7k labeled demonstration trajectories and 47k unlabeled ones inside a kitchen manipulation setting. Since all of the trajectories on this dataset needed to be manually annotated by people, with the ability to straight use the 47k trajectories with out annotation considerably improves effectivity.
To study from each sorts of knowledge, GRIF is skilled collectively with language-conditioned behavioral cloning (LCBC) and goal-conditioned behavioral cloning (GCBC). The labeled dataset comprises each language and purpose process specs, so we use it to oversee each the language- and goal-conditioned predictions (i.e. LCBC and GCBC). The unlabeled dataset comprises solely objectives and is used for GCBC. The distinction between LCBC and GCBC is only a matter of choosing the duty illustration from the corresponding encoder, which is handed right into a shared coverage community to foretell actions.
By sharing the coverage community, we are able to anticipate some enchancment from utilizing the unlabeled dataset for goal-conditioned coaching. Nevertheless,GRIF permits a lot stronger switch between the 2 modalities by recognizing that some language directions and purpose photos specify the identical habits. Specifically, we exploit this construction by requiring that language- and goal- representations be comparable for a similar semantic process. Assuming this construction holds, unlabeled knowledge may also profit the language-conditioned coverage because the purpose illustration approximates that of the lacking instruction.
Alignment by contrastive studying
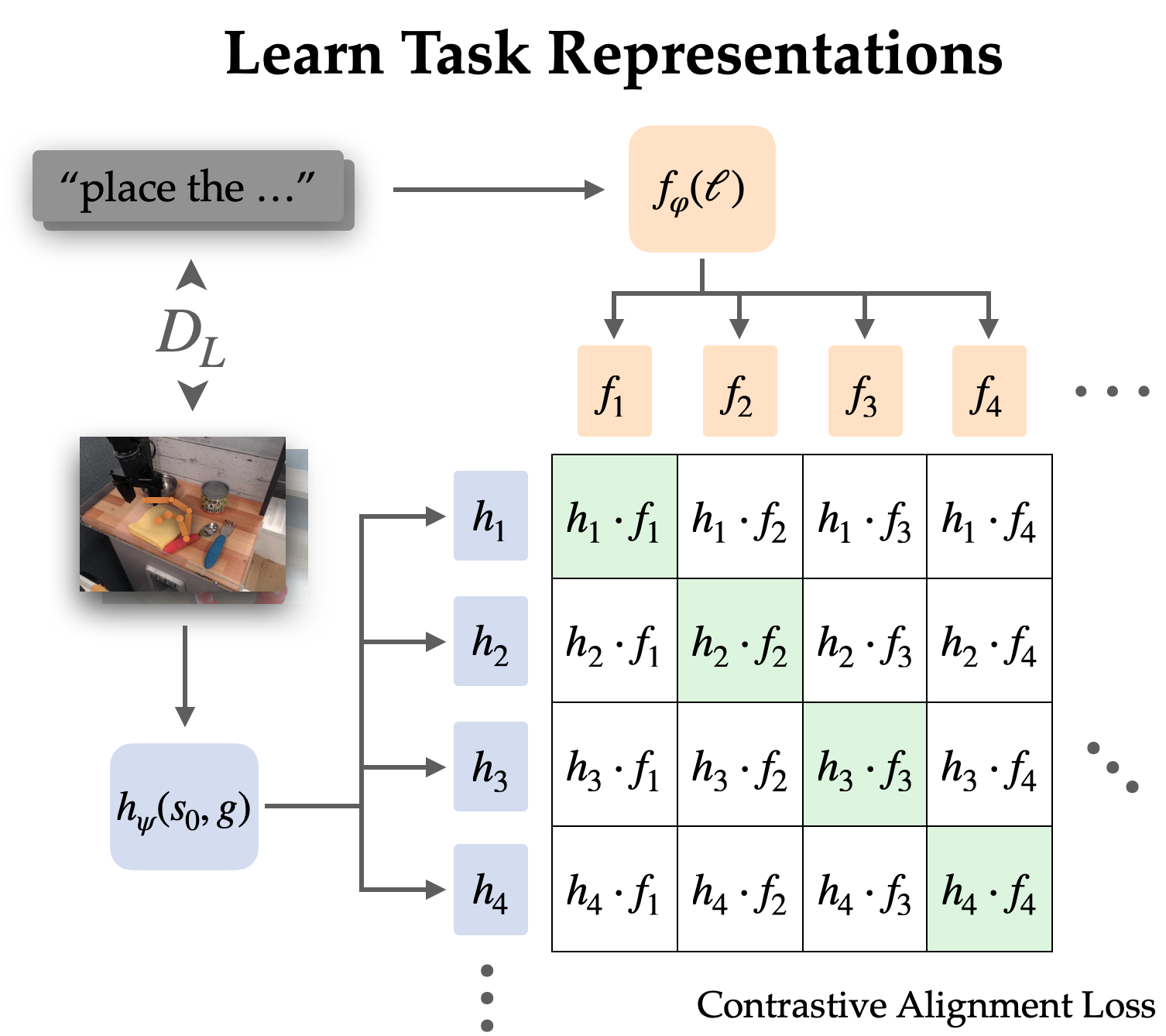
We explicitly align representations between goal-conditioned and language-conditioned duties on the labeled dataset by contrastive studying.
Since language usually describes relative change, we select to align representations of state-goal pairs with the language instruction (versus simply purpose with language). Empirically, this additionally makes the representations simpler to study since they will omit most info within the photos and deal with the change from state to purpose.
We study this alignment construction by an infoNCE goal on directions and pictures from the labeled dataset. We practice twin picture and textual content encoders by doing contrastive studying on matching pairs of language and purpose representations. The target encourages excessive similarity between representations of the identical process and low similarity for others, the place the adverse examples are sampled from different trajectories.
When utilizing naive adverse sampling (uniform from the remainder of the dataset), the discovered representations usually ignored the precise process and easily aligned directions and objectives that referred to the identical scenes. To make use of the coverage in the actual world, it isn’t very helpful to affiliate language with a scene; fairly we’d like it to disambiguate between totally different duties in the identical scene. Thus, we use a tough adverse sampling technique, the place as much as half the negatives are sampled from totally different trajectories in the identical scene.
Naturally, this contrastive studying setup teases at pre-trained vision-language fashions like CLIP. They exhibit efficient zero-shot and few-shot generalization functionality for vision-language duties, and provide a option to incorporate data from internet-scale pre-training. Nevertheless, most vision-language fashions are designed for aligning a single static picture with its caption with out the power to know modifications within the atmosphere, and so they carry out poorly when having to concentrate to a single object in cluttered scenes.
To deal with these points, we devise a mechanism to accommodate and fine-tune CLIP for aligning process representations. We modify the CLIP structure in order that it might function on a pair of photos mixed with early fusion (stacked channel-wise). This seems to be a succesful initialization for encoding pairs of state and purpose photos, and one which is especially good at preserving the pre-training advantages from CLIP.
Robotic coverage outcomes
For our important outcome, we consider the GRIF coverage in the actual world on 15 duties throughout 3 scenes. The directions are chosen to be a mixture of ones which might be well-represented within the coaching knowledge and novel ones that require some extent of compositional generalization. One of many scenes additionally options an unseen mixture of objects.
We examine GRIF towards plain LCBC and stronger baselines impressed by prior work like LangLfP and BC-Z. LLfP corresponds to collectively coaching with LCBC and GCBC. BC-Z is an adaptation of the namesake technique to our setting, the place we practice on LCBC, GCBC, and a easy alignment time period. It optimizes the cosine distance loss between the duty representations and doesn’t use image-language pre-training.
The insurance policies have been vulnerable to 2 important failure modes. They will fail to know the language instruction, which leads to them trying one other process or performing no helpful actions in any respect. When language grounding shouldn’t be sturdy, insurance policies may even begin an unintended process after having completed the proper process, because the unique instruction is out of context.
Examples of grounding failures

“put the mushroom within the metallic pot”

“put the spoon on the towel”

“put the yellow bell pepper on the material”

“put the yellow bell pepper on the material”
The opposite failure mode is failing to govern objects. This may be resulting from lacking a grasp, transferring imprecisely, or releasing objects on the incorrect time. We observe that these are usually not inherent shortcomings of the robotic setup, as a GCBC coverage skilled on all the dataset can constantly reach manipulation. Relatively, this failure mode usually signifies an ineffectiveness in leveraging goal-conditioned knowledge.
Examples of manipulation failures

“transfer the bell pepper to the left of the desk”

“put the bell pepper within the pan”

“transfer the towel subsequent to the microwave”
Evaluating the baselines, they every suffered from these two failure modes to totally different extents. LCBC depends solely on the small labeled trajectory dataset, and its poor manipulation functionality prevents it from finishing any duties. LLfP collectively trains the coverage on labeled and unlabeled knowledge and exhibits considerably improved manipulation functionality from LCBC. It achieves affordable success charges for widespread directions, however fails to floor extra advanced directions. BC-Z’s alignment technique additionally improves manipulation functionality, probably as a result of alignment improves the switch between modalities. Nevertheless, with out exterior vision-language knowledge sources, it nonetheless struggles to generalize to new directions.
GRIF exhibits the most effective generalization whereas additionally having sturdy manipulation capabilities. It is ready to floor the language directions and perform the duty even when many distinct duties are potential within the scene. We present some rollouts and the corresponding directions beneath.
Coverage Rollouts from GRIF

“transfer the pan to the entrance”

“put the bell pepper within the pan”

“put the knife on the purple fabric”

“put the spoon on the towel”
Conclusion
GRIF permits a robotic to make the most of giant quantities of unlabeled trajectory knowledge to study goal-conditioned insurance policies, whereas offering a “language interface” to those insurance policies through aligned language-goal process representations. In distinction to prior language-image alignment strategies, our representations align modifications in state to language, which we present results in important enhancements over commonplace CLIP-style image-language alignment goals. Our experiments exhibit that our strategy can successfully leverage unlabeled robotic trajectories, with giant enhancements in efficiency over baselines and strategies that solely use the language-annotated knowledge
Our technique has plenty of limitations that could possibly be addressed in future work. GRIF shouldn’t be well-suited for duties the place directions say extra about do the duty than what to do (e.g., “pour the water slowly”)—such qualitative directions may require different sorts of alignment losses that think about the intermediate steps of process execution. GRIF additionally assumes that each one language grounding comes from the portion of our dataset that’s totally annotated or a pre-trained VLM. An thrilling course for future work could be to increase our alignment loss to make the most of human video knowledge to study wealthy semantics from Web-scale knowledge. Such an strategy might then use this knowledge to enhance grounding on language outdoors the robotic dataset and allow broadly generalizable robotic insurance policies that may comply with person directions.
This submit is predicated on the next paper:

BAIR Weblog
is the official weblog of the Berkeley Synthetic Intelligence Analysis (BAIR) Lab.
BAIR Weblog
is the official weblog of the Berkeley Synthetic Intelligence Analysis (BAIR) Lab.
[ad_2]